
")


")
Японцы обучили робота взбираться по вертикальной лестнице
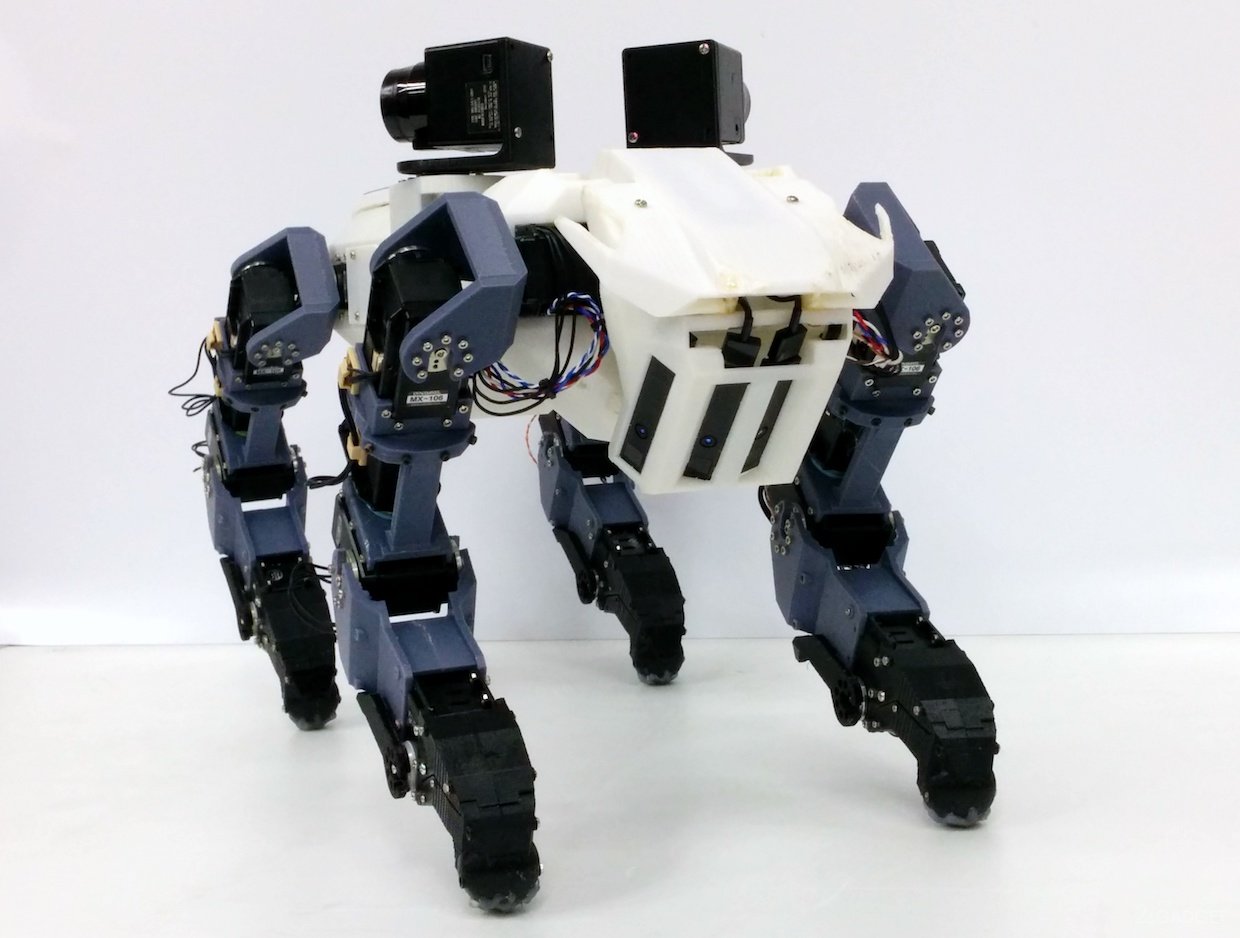
Современные роботы могут выполнять достаточно сложные манипуляции, проводить быстрые вычисления и решать неординарные задачи. Однако встреча с обыкновенной вертикальной лестницей ставит перед нынешними терминаторами неразрешимую проблему. На выручку нашим механическим помощникам пришли разработчики из Токийского столичного университета, которые создали специального робота с четырьмя конечностями, способного передвигаться по горизонтальной поверхности и без посторонней помощи лазать по вертикальным лестницам.
Инженеры сконструировали робота массой 7 кг, имеющего на всех четырех конечностях специальные захваты, которые не препятствуют движению по горизонтальной поверхности, но незаменимы при подъеме по лестнице. «Руко-ноги» робота получили пять степеней свободы, датчики касания и давления, а кроме того оригинальный манипулятор слегка напоминающий большой палец у человека и позволяющий карабкаться по перекладинам лестницы.
[center]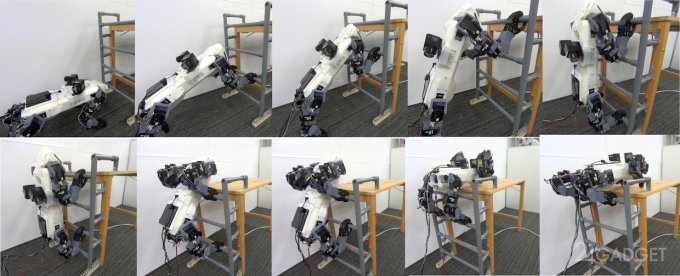
[/center]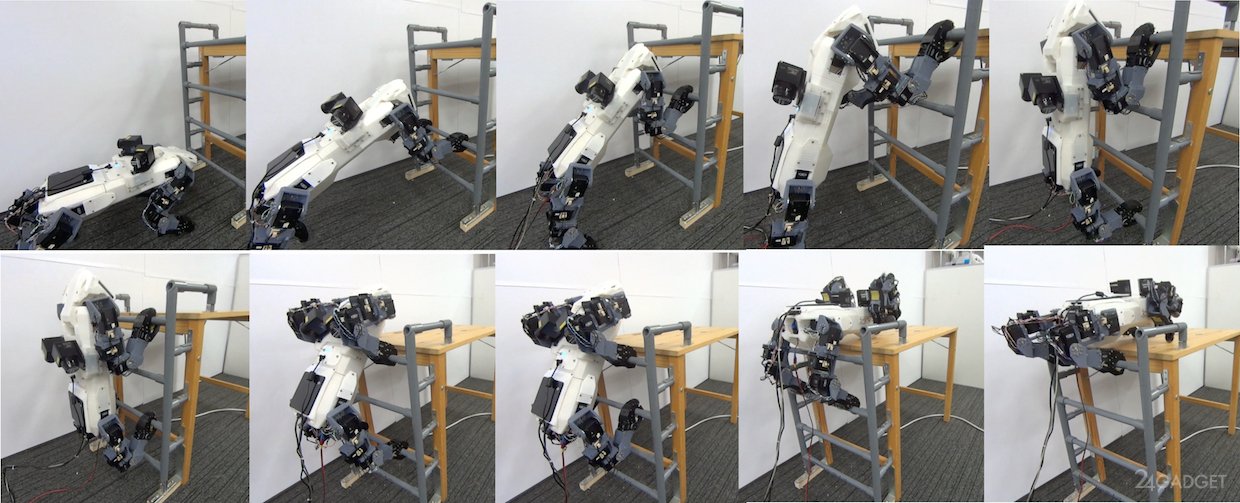
Навигационные приборы робота состоят из 2-х лазерных дальномеров и 4-х ToF-камер с одной степенью свободы. Используя оба типа датчиков, алгоритм робота измеряет расстояние до окружающих объектов, и на основании многочисленных сканирований составляет облако точек, которое в дальнейшем анализируется. Определив в качестве препятствия вертикальную лестницу, алгоритм выбирает способы захвата перекладин или поручней и траекторию движения.
Алгоритм имеет два существенных недостатка. Во-первых, для каждой лестницы требуется проходить отдельное обучение, а во-вторых, движение робота по вертикали слишком медленны.